Publishing in a few days how to make yourself this machine. To-do : - endstops contacts on both axis, - illimited rotation (with brush-style contacts) As you can see on the picture I tried with a KINECT used as a 3D-scanner. Can obviously be used in MANY cases and problems (like DRONES DEFENSE with a camera plugged into a RaspberryPi +code ) ... Over and out for now.
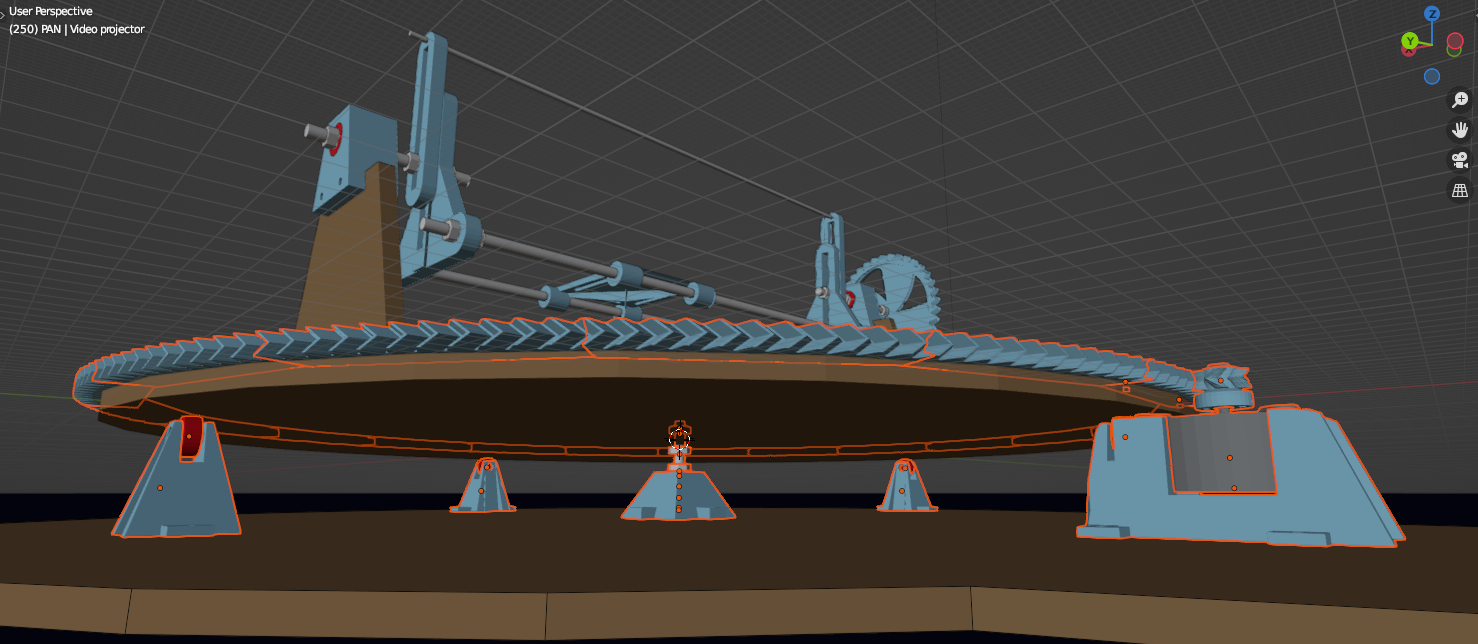
This version 0.09 corrects the PAN gears division : 209 / 11 = 19.
You have to 3D-print 19 times the 11 teeth section.
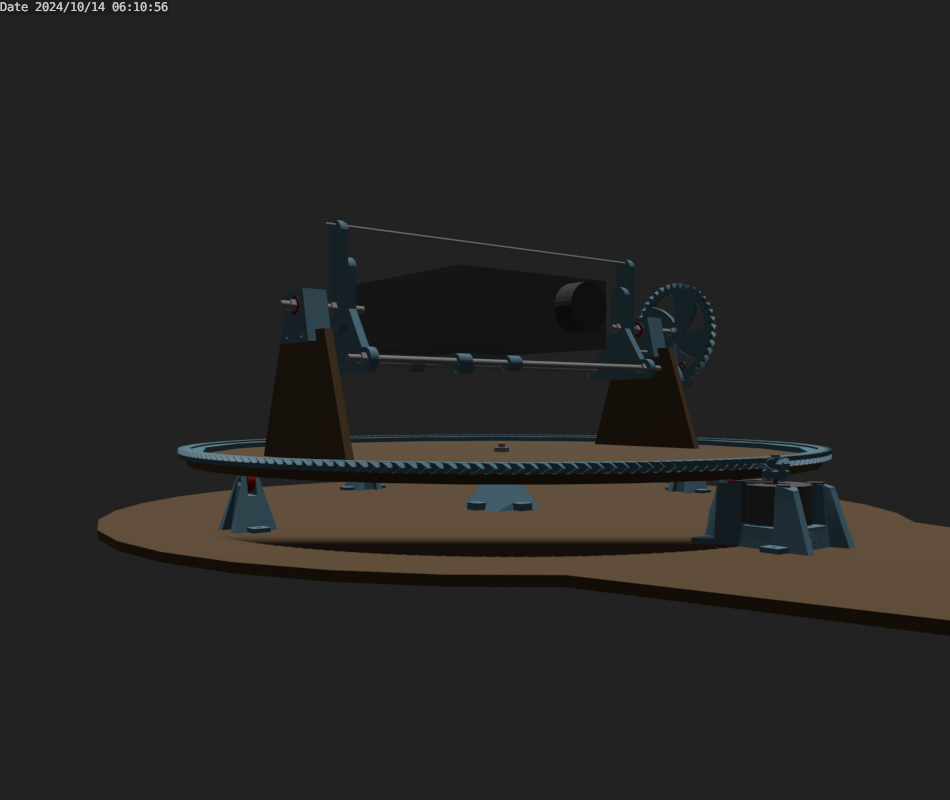
The charge problematic depends on what you are using. The upper bar is for a counter weight, so the Tilt gears can move the charge easier. So, if the charge's center of gravity doesn't match -like for the video projector example- place a counter-weight above it using the Tilt "T arm" and slider part for the counter-weight like on the picture with the Kinect.
A read once in a sci-fi book (can't remember which one), about a guy arriving on a planet with low gravity, defended by ultra-fast "laser pointing machines" with movements timed in milliseconds... the guy had to make 9Km jumps with an exoskeleton equiped suite. While he was "jumping" he could be fried by those machines...
Just posting this as a note... the future will need those ones... for example AGAINST METEORS... or SWARMS of WHATEVER (thinking about insects swarms)...
(isn't there a Mosquito killer already ? hmmmf no time to search now this one, but I saw this passing by "a infinite elevator" website... (instagram)).
Anyway, please have a nice imagination about that, because I'm thinking only about DEFENSE.
3/ you have to program the Arduino : already started and posted on github something similar with the GrippyBot Remote Control and firmware ( which can play a Star Wars music... I let you discover which one... ;P ).
The Arduino+Shield are different from the Arduino Mega 2560 I used on the GrippyBot. But the idea is the same : serial connexion between the Arduino and a computer running Linux (any old laptop would be perfect or a RaspeberryPi).
On the computer : you can plug a joypad (like me with the grippybot showed at Capitol du Libre 2017 2016) or program a more sofisticated system with a camera and image analyzing capabilities.








Comments
Found a nice .blend backup !
Publishing in a few days how to make yourself this machine. To-do : - endstops contacts on both axis, - illimited rotation (with brush-style contacts) As you can see on the picture I tried with a KINECT used as a 3D-scanner. Can obviously be used in MANY cases and problems (like DRONES DEFENSE with a camera plugged into a RaspberryPi +code ) ... Over and out for now.
Version 0.09 published.
Clean .blend file.
12 .STL files.
Will post how to build it this week.
my bad,
The central disc is 80cm wide.
This version 0.09 corrects the PAN gears division : 209 / 11 = 19.
You have to 3D-print 19 times the 11 teeth section.
The charge problematic depends on what you are using. The upper bar is for a counter weight, so the Tilt gears can move the charge easier. So, if the charge's center of gravity doesn't match -like for the video projector example- place a counter-weight above it using the Tilt "T arm" and slider part for the counter-weight like on the picture with the Kinect.
If everyone makes this = Status Quo with Drones.
If everyone can defend himself against drones :
Aggressive Drones turn to be useless,
Which would be cool.
(of course there's still a lot of work to point a powerfull laser with precision on a incoming drone, I'm not saying it's easy)
Science-fiction inspired...
PAN-TILT machines... = huge subject.
A read once in a sci-fi book (can't remember which one), about a guy arriving on a planet with low gravity, defended by ultra-fast "laser pointing machines" with movements timed in milliseconds... the guy had to make 9Km jumps with an exoskeleton equiped suite. While he was "jumping" he could be fried by those machines...
Just posting this as a note... the future will need those ones... for example AGAINST METEORS... or SWARMS of WHATEVER (thinking about insects swarms)...
(isn't there a Mosquito killer already ? hmmmf no time to search now this one, but I saw this passing by "a infinite elevator" website... (instagram)).
Anyway, please have a nice imagination about that, because I'm thinking only about DEFENSE.
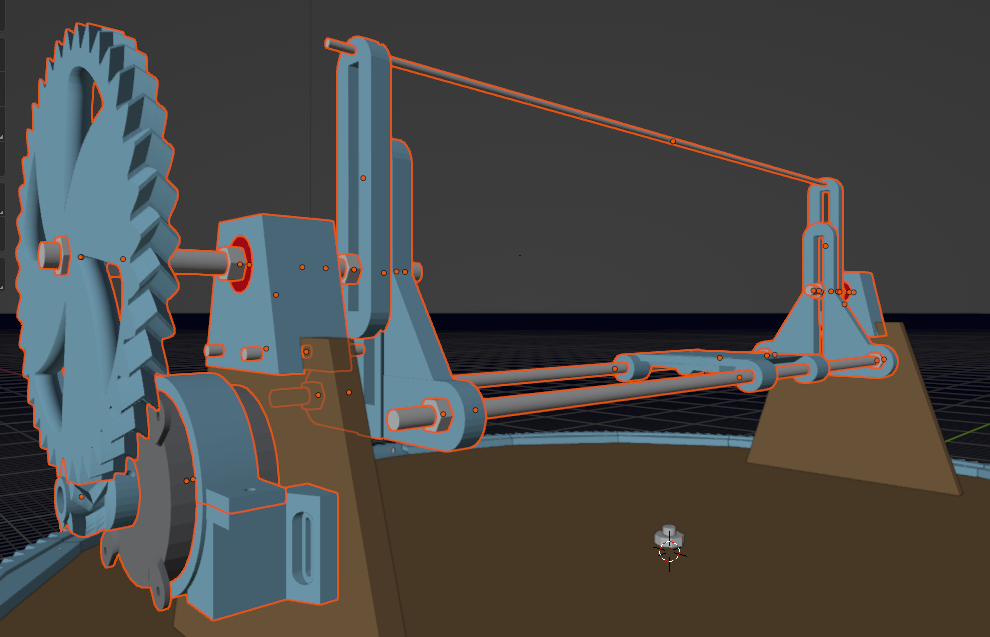
Gears could be multiplied
Obviously :
1/ you can SCALE -up or down- this.
2/ make your own gears in function of the charge.
3/ you have to program the Arduino : already started and posted on github something similar with the GrippyBot Remote Control and firmware ( which can play a Star Wars music... I let you discover which one... ;P ).
The Arduino+Shield are different from the Arduino Mega 2560 I used on the GrippyBot. But the idea is the same : serial connexion between the Arduino and a computer running Linux (any old laptop would be perfect or a RaspeberryPi).
On the computer : you can plug a joypad (like me with the grippybot showed at Capitol du Libre
20172016) or program a more sofisticated system with a camera and image analyzing capabilities.